Drs. Robert W. Emery, Keith Progebin, and Kim Knoll discuss some principles of modern digital implant dentistry
Abstract
The use of cone beam computed tomography and intraoral scanners has allowed the implant team to diagnose and treatment plan cases with remarkable accuracy and precision. The active use of these diagnostic tools has been limited due to the expense and complexity of CAD/CAM surgical guides. New dynamic navigation systems now allow dental surgeons to scan, plan, and execute guided surgery on the same day in their office with no need for laboratory fabricated parts. Real-time, turn-by-turn navigation of the implant leads to accurate and precise implant placement. Increased accuracy and precision leads to the better restorative and esthetic outcomes with minimal incisions and pain. This is done in a time and cost-efficient fashion. This article will present two esthetic zone cases that illustrate the principles of modern digital implant dentistry: multidisciplinary dentistry, pre-surgical orthodontics, dynamic navigation of implant placement immediately after extraction, minimally invasive soft tissue surgery, and immediate analog and milled CAD/CAM provisional restorations.
Educational aims and objectives
This article aims to illustrate the indications and implementation of dynamic navigation
with a modern implant multidisciplinary dentistry approach.
Expected outcomes
Implant Practice US subscribers can answer the CE questions to earn 2 hours of CE from reading this article. Correctly answering the questions will demonstrate the reader can:
- Realize that implants placed freehand are less accurate and precise than implants placed with dynamic guidance.
- Realize that there are a number of unique advantages to dynamic navigation.
- Realize that dynamic navigation can be implemented with both a traditional analog approach and a fully digital approach.
The vast majority of dental implants are placed freehand, many with good results. Unfortunately, the precision with which freehand implants are placed is variable, and even the best surgeon can have a “bad day” resulting in difficult restorative situations, and worse, damage to adjacent anatomic structures and loss of the implant or adjacent natural teeth.1,2 To improve accuracy and precision of implant placement, computer-assisted surgery (CAS) has been developed. There are two forms of CAS: static guides also known as prefabricated CT-generated computer-aided stents (CAD/CAM) with metal tubes and coordinated instruments — and the other, dynamic navigation. Both dynamic and static guidance are highly accurate and precise.3,4 Scherer, et al., in a porcine model showed that freehand placement is significantly less accurate (p < 0.001) than static guidance.5 Block, et al., compared implant placement to a new dynamic navigation system (X-Guide®, X-Nav Technologies, LLC, Lansdale, Pennsylvania), to freehand implant placement by experienced surgeons in clinical trials and showed again that guidance was significantly (p < 0.05) more accurate than freehand.6 The mean (standard deviation) angular deviation for freehand was 7.69 (4.92) degrees, for the X-Guide 3.62 (2.73). Entry point lateral deviation freehand was 1.15 mm (0.59) for X-Guide 0.87 mm, (0.42) and for apical lateral deviation, freehand was 2.21 mm (0.99), and for the X-Guide 1.09 (0.66). In a clinical simulation model study on the accuracy of the X-Guide system, it was shown to be highly accurate with mean angular deviations from the planned position of 1.09 degrees ± 0.55, mean entry lateral deviations of 0.33 mm ± 0.19, and mean apical lateral deviations of 0.36mm ± 0.20.7 Model studies are useful to evaluate the true accuracy of a system for comparisons with other guided systems as they remove some of the confounding variables of clinical trials.
CAS also gives the surgeon a way to decrease pain for patients. Fortin,8 in a randomized clinical trial comparing the pain experience of patients that underwent traditional freehand open flap procedures to guided flapless procedures, found significantly higher (P<.01) visual analog pain scale scores for open procedures.Pain also decreased faster with flapless procedures (P = .05). The number of patients reporting no pain was higher with flapless procedures, 43% versus 20% for open procedures. Dynamic navigation allows the surgeon to perform closed-flap procedures, thus offering the patient decreased pain. This is done without blocking the surgical visual field as with a static surgical guide.
Often overlooked when discussing pain is the fact that up to 73.9% of dentists will develop musculoskeletal symptoms and pain during their careers.9 Ratzon noted that dentists who alternated their work position from standing to sitting had less low back pain and recommended frequently changing postures to decrease the incidence of lower back pain.10 Using dynamic guidance allows the surgeon to sit or stand with a “heads-up view” while guiding the implants with real-time, magnified, turn-by-turn control of the surgical drill.
If CAS is more accurate and precise, what has held back its use? CAD/CAM static guides must be fabricated in a laboratory. This requires the dentist to take either a conventional or optical intraoral impression, create models, plan, and then fabricate the guide. This is inconvenient for the patient and the doctor. Static guides also add considerable expense to the procedure. Guide costs vary from $300 for single tooth to over $1,000 for full arch case. This has led implant surgeons to “only guide the high-risk cases.” Dynamic navigation requires no lab-fabricated parts. Every step can be completed in a single visit with costs below $100 per arch. This decrease in complexity and cost has led to a rapid acceptance of the technology within the surgical implant community with over 2,000 implants placed using the X-Guide since its introduction to the market. It also means that every implant can now be guided — improving predictability, decreasing pain for patients, and hopefully, improving the long-term outcome of our restorations.
Dynamic navigation versus static guides
How do you choose which form of guidance you want to use? Block pointed out some of the following advantages of dynamic navigation:11
- Patients can be scanned and planned on the same day as surgery.There is no laboratory-fabricated guide so the plan can be changed at any time.
- Any implant system can be guided. Dynamic navigation is “open architecture.”
- The surgical field can be visualized at any time. Guides do not obstruct views.
- When implemented by a trained team, implant placement is rapid and efficient.
- Plans can be shared with the entire multidisciplinary team and altered at any time.
- Patients with minimal mouth opening can undergo dynamic navigation.
- Tube size limitations and fabrication issues are not present with dynamic navigation.
- Dynamic navigation allows real-time, turn-by-turn guidance with a heads-up practitioner posture.
- Dynamic navigation allows the use of intraoral scanning without the need of physical models.
Case reports
The following cases will illustrate some of the indications for dynamic image navigation in the esthetic zone with a multi-disciplinary approach. The first case will illustrate use of dynamic navigation with a traditional analog approach, and the second case will present a totally digital approach both using dynamic navigation, intraoral scanning, and model-less milling of a provisional for an immediate screw-retained provisional.
Case 1


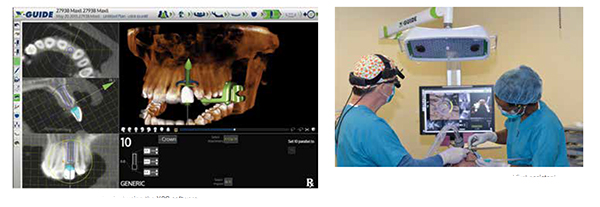
The first case involves a 24-year-old female presenting for implant reconstruction of a congenitally missing lateral incisor No. 10. She has undergone pre-surgical orthodontics to optimize the implant site (Figure 1). Her soft tissue is noted to be thin with tall papilla. Her prosthodontist fabricated an imaging guide prior to CBCT acquisition (Figure 2). The prefabricated, thermoplastic fiducial tracking device (X-Clip®, X-Nav Technologies, LLC, Lansdale, Pennsylvania), was heated in warm water and placed in the patient’s mouth. This was then removed and placed in cold water to harden. The X-Clip was then replaced in the same location with the imaging guide and a CBCT taken at 0.3 voxel resolution. The DICOM files were imported into the X-Guide software (XOS®, X-Nav Technologies, LLC, Lansdale, Pennsylvania). The arch was defined, a virtual tooth placed, and the virtual implant planned using the XOS. Implants are planned generically using the implant platform, apical and length dimensions. In this case, a Straumann® 3.3 mm x 12 mm Bone Level (Straumann® USA LLC, Andover, Massachusetts) was planned (Figure 3). The patient was then ready for surgery. The surgical staff followed the prompts in the X-Guide software and calibrated the drill and the X-Clip patient tracking assembly. Each step takes 30 to 60 seconds. Surgery was then able to begin. The surgeon watched the screen during guidance, and the assistant suctioned, retracted and watched the patient at all time to avoid soft tissue trauma from instruments (Figure 4). In this case, a subepithelial connective-tissue graft was harvested from the left tuberosity and placed via a micro-flap/cinch suture technique (Figure 5). The patient then went to her prosthodontist for an immediate provisional using a stock prefabricated provisional abutment and chair side fabrication (Figure 6). Figure 7 shows the patient 2 weeks after provisional restoration. The patient left the country for studies abroad, and after a period of 12 months of tissue maturation, a final UCLA custom gold abutment with an all ceramic lithium disilicate crown was fabricated duplicating the idealized soft tissue (Figures 8). This was made using standard analog impressions of the implant body. This was cemented with a ZOE-based temporary cement. Figure 9 shows the final highly esthetic result after cementation with temporary cement showing natural emergence profile, ceramic esthetics, and mature thick tissue around the implant.


Case 2

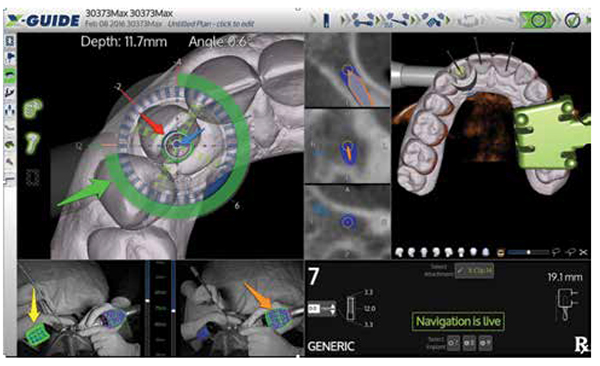

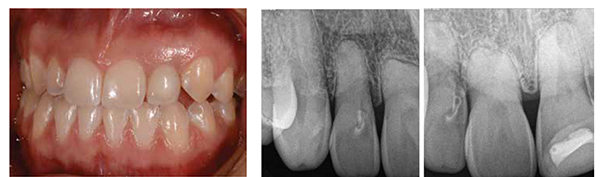
The second case involves a 47-year-old male with a history of orthodontics 20 years ago. He subsequently developed root blunting of the maxillary incisors and internal resorption of the right maxillary lateral incisor and left central incisor (Figures 10A and 10B). Recently the right lateral and both central incisors had become symptomatic with increased mobility. After endodontic consultation, the decision was made to extract the teeth and place immediate implants. Prior to diagnostic CBCT, an X-Clip was warmed in hot water and placed on teeth Nos. 12, 14, and 15. The clip was removed and placed in ice water. It was then returned to its intraoral position, and a CBCT was taken. After review of the CBCT, it was noted that the patient had thick buccal bone and was ideally suited for extraction and immediate implant placement. An intraoral laser scan (TRIOS®, 3Shape A/S, Copenhagen, Denmark; in North America, Warren, New Jersey) was performed. The DICOM file from the CBCT and the STL files from the laser scan were imported into the X-Guide’s system software (XOS). This merged dataset was used for planning of the implants. The resolution of superimposed intraoral scans is detailed enough that virtual teeth are not required for treatment planning. Three Straumann 3.3 mm x 12 mm, parallel wall, Bone Level Implants were placed, with implant No. 7 being 3.3 mm in diameter and implant Nos. 8 and 9 being 4.1 mm. Bone Level Implants were planned (Figure 11). The planning was completed using the X-Guide software, and the decision was made to place the implants and immediately provisionalize with screw-retained milled temporaries. Prior to surgery, the staff calibrated the X-Clip patient tracking array assembly and drill, each taking 30 to 60 seconds. Additionally, prior to surgery, an intraoral scanner (TRIOS®, 3Shape A/S) was used to acquire shade and a three-dimensional scan. The teeth were then extracted atraumatically. The X-Guide was used to place the implants immediately. Figure 12 shows the live tracking screen, which has information for both the surgeon and the staff. The X-Guide indicates the entry point for the virtual drill, or the center of the implant platform, with the “X” in the center of the target view. In Figure 12, the tip of the virtual drill is shown at the entry point. The drill tip is indicated on the screen as a blue dot and is indicated by the blue arrow. A small circle indicates the back of the virtual drill, and the red arrow is pointed at this circle. During surgery, the dentist guides the blue dot over the center of the X of the target and then centers the back of the drill with a “bird’s-eye view” centered on the blue dot. This gives the surgeon entry point and angle. Next while drilling, the surgeon can visualize depth by watching the large and small circle change color. The large circle, with the green arrow pointed at it in Figure 12, changes from yellow to green when the tip of the drill is within 1 mm of the predetermined depth. When the drill reaches or exceeds the depth of the implant, the circle will turn red. The maximum depth is always located at the 9 o’clock position on the circle no matter what the length. The clinical staff use these windows to aim the cameras at the two tracking arrays. The yellow area on the left shows the tracking array attached to the X-Clip brightly illuminated to indicate the excellent quality of tracking. The orange arrow on the right is pointed at the tracking array attached to the drill again brightly illuminated to indicate the excellent quality of tracking. Each array has hundreds of unique points that are being tracked and used to triangulate the position of the patient and the drill for real time navigation. The window in the top-left corner gives the entire team a 3D view of the arch. This view can be oriented any way the surgeon likes relative to the surgeon’s operative position as can the target view.
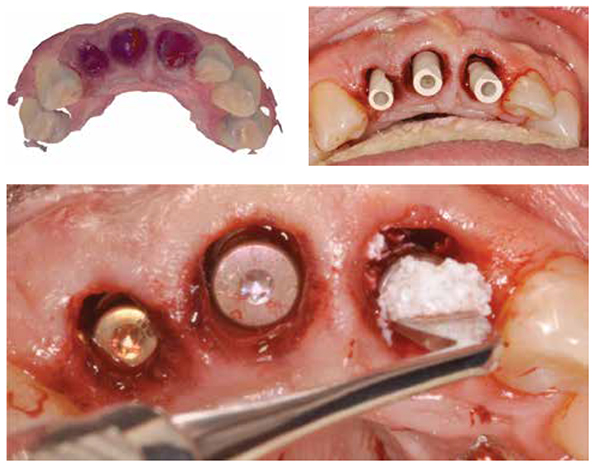
The implants all had torque values greater than 35 Ncm and ISQ values over 66. The 3Shape scanner was then used to acquire an image for virtual modeling of the soft tissues (Figure 13A). Scan bodies were placed and an impression taken with the scanner (Figure 13B). After the scan, the scan bodies were removed, healing abutments placed, and a buccal horizontal bone graft accomplished using xenograft (Figure 13C). The patient was than given an Essex provisional and sent home for the evening. During the evening, the laboratory designed and milled a provisional restoration (Figure 14). The next morning, the patient returned to his restorative dentist for placement of a splinted screw-retained PMMA acrylic-milled provisional restoration (Figures 15A-15B). Urethane dimethacrylate (Revotec LC™, GC America Inc., Alsip, Illinois) was used to seal the screw access holes. A nano-hybrid hybrid composite (IPS Empress® Direct, Ivoclar Vivadent®, Amherst, New York) was used for esthetic incisal matching. Occlusion was checked in centric as well as protrusive with the aim to have no contacts on the integrating implant provisionals during the healing phase. Figure 15C shows an occlusal view with no centric or protrusive contacts.

Summary
These two cases illustrate the versatility of dynamic navigation. Both cases were in the challenging esthetic zone and involved immediate provisional placement. In the first case, classic analog technology was used, an imaging guide was fabricated prior to CBCT acquisition, and a chairside provisional was fabricated. The second case involved a model-less, state-of-the-art, all-digital approach with a screw-retained, milled restoration.
The advantages of dynamic navigation are:
- Patients can be scanned and planned on the same day as surgery.
- There is no laboratory-fabricated guide, so the plan can be changed at any time.
- Any implant system can be guided. Dynamic navigation is “open.”
- The surgical field can be visualized at any time. Guides are not obstructing views.
- When implemented by a trained team, implant placement is rapid and efficient.
- Plans can be shared with the entire multidisciplinary team and altered at any time.
- Patients with minimal mouth opening can undergo dynamic navigation.
- Tube size limitations and fabrication issues are not present with dynamic navigation.
- Dynamic navigation allows real-time, turn-by-turn guidance with a heads-up posture.
- Dynamic navigation allows the use of intraoral scanning without the need of physical models.
Acknowledgments
Lab work for first case was performed by Kaz RDT Dental Laboratory. Restorative dentistry for the second case was performed by Dr. Kim Knoll. Lab work for the second case was performed by Nextek Dental Studios, Manassas, Virginia.
Author Info
 Robert W. Emery, BDS, DDS, is a board-certified Oral and Maxillofacial Surgeon in private practice in Washington, DC. Dr. Emery received the Nobelpharma Oral and Maxillofacial Surgery Research Award and Grant from the Oral and Maxillofacial Surgery Research Foundation. He is actively involved in numerous research projects with an emphasis on image-guided surgery and is a founding partner of X-Nav Technologies, LLC. Presently, he is Director of the Capital Center for Oral and Maxillofacial Surgery, Senior Attending Surgeon at the Washington Hospital Center, and Chief Medical Officer of X-Nav Technologies.
Robert W. Emery, BDS, DDS, is a board-certified Oral and Maxillofacial Surgeon in private practice in Washington, DC. Dr. Emery received the Nobelpharma Oral and Maxillofacial Surgery Research Award and Grant from the Oral and Maxillofacial Surgery Research Foundation. He is actively involved in numerous research projects with an emphasis on image-guided surgery and is a founding partner of X-Nav Technologies, LLC. Presently, he is Director of the Capital Center for Oral and Maxillofacial Surgery, Senior Attending Surgeon at the Washington Hospital Center, and Chief Medical Officer of X-Nav Technologies.
 Keith Progebin, DDS, is a former Associate Clinical Instructor, Department of Prosthodontics and Occlusion, New York University College of Dentistry; Member of the Academy of Osseointegration and American College of Prosthodontics; Fellow of the Greater New York Academy of Prosthodontics; Fellow, International College of Dentists; Fellow, American College of Dentists; and in Private Practice in Advanced Restorative Dentistry and Implant Prosthodontics in Washington, DC.
Keith Progebin, DDS, is a former Associate Clinical Instructor, Department of Prosthodontics and Occlusion, New York University College of Dentistry; Member of the Academy of Osseointegration and American College of Prosthodontics; Fellow of the Greater New York Academy of Prosthodontics; Fellow, International College of Dentists; Fellow, American College of Dentists; and in Private Practice in Advanced Restorative Dentistry and Implant Prosthodontics in Washington, DC.
 Kim Knoll, DDS, is a general dentist practicing in Washington, DC, since 1988. He graduated from Georgetown School of Dentistry. He is a member of the American Dental Association, DC Dental Society, an Associate Fellow of the World Clinical Laser Institute, and a founding member of the Renaissance Study Club. He specializes in advanced restorative procedures involving digital modalities to achieve his reconstructive outcomes. He has been using implants and other innovative techniques to accomplish many desirable restorative solutions for complicated cases.
Kim Knoll, DDS, is a general dentist practicing in Washington, DC, since 1988. He graduated from Georgetown School of Dentistry. He is a member of the American Dental Association, DC Dental Society, an Associate Fellow of the World Clinical Laser Institute, and a founding member of the Renaissance Study Club. He specializes in advanced restorative procedures involving digital modalities to achieve his reconstructive outcomes. He has been using implants and other innovative techniques to accomplish many desirable restorative solutions for complicated cases.
Disclosure: Dr. Emery has a proprietary interest in X-Nav Technologies, LLC. Drs. Progebin and Knoll have no conflicts to disclose.
References
- Kim S. Clinical complications of dental implants. In: Turkyilmaz I, ed. Implant Dentistry – A Rapidly Evolving Practice. InTech. 2011:467–490.
- Goodacre CJ, Kan JY, Rungcharassaeng K. Clinical complications of osseointegrated implants. J Prosthet Dent. 1999;81(5):537-552.
- Tahmaseb A, Wismeijer D, Coucke W, Derksen W. Computer technology applications in surgical implant dentistry: a systematic review. Int J Oral Maxillofac Implants. 2014;29(suppl):25-42
- Jung RE, Schneider D, Ganeles J, et al. Computer technology applications in surgical implant dentistry: a systematic review. Int J Oral Maxillofac Implants. 2009;24(suppl):92-109.
- Scherer U, Stoetzer M, Ruecker M, Gellrich NC, von See C. Template-guided vs. non-guided drilling in site preparation of dental implants. Clin Oral Investig. 2015;19(6):1339-1346.
- Block MS, Emery RW, Lank K RJ. Accuracy using dynamic navigation. Int J Oral Maxillofac. In press.
- Emery, RW, Merritt SA, Lank K, Gibbs JD. Accuracy of dynamic navigation for dental implant placement — model-based evaluation. J Oral Implantol. In press.
- Fortin T, Bosson JL, Isidori M, Blanchet E. Effect of flapless surgery on pain experienced in implant placement using an image-guided system. Int J Oral Maxillofac Implants. 2006;21(2):298-304.
- Gopinadh A, Devi KN, Chiramana S, Manne P, Sampath A, Babu MS. Ergonomics and musculoskeletal disorder: as an occupational hazard in dentistry. J Contemp Dent Pract. 2013;14(2):299-303.
- Ratzon NZ, Yaros T, Mizlik A, Kanner T. Musculoskeletal symptoms among dentists in relation to work posture. Work. 2000;15(3):153-158.
- Block MS, Emery RW. Static or dynamic navigation for implant placement—choosing the method of guidance. J Oral Maxillofac Surg. 2016;74(2):269-277.

